-
2016�������o���{���܇�lչ�v�̬F�·��څ��̽ӑ
2016/3/23 10:44:53����Դ:�Ї��a�I�lչ�о��W�������w���� �� С�����ղر��������ӡ�����P�]��
������ʾ���o���{���܇��һ�N������܇��Ҳ���ԷQ֮��݆ʽ�ƄәC���ˣ���Ҫ����܇�ȵ���Ӌ��Cϵ�y�����������{�x�팍�F�o���{�o���{������˹����ܡ�ҕ�XӋ�㡢���_���O���b�ú�ȫ��λϵ�y�fͬ��������X�����ڛ]���κ�������ӵIJ����£��ԄӰ�ȫ�ز��������o���{���܇��һ�N������܇��Ҳ���ԷQ֮��݆ʽ�ƄәC���ˣ���Ҫ����܇�ȵ���Ӌ��Cϵ�y�����������{�x�팍�F�o���{
�����o���{������˹����ܡ�ҕ�XӋ�㡢���_���O���b�ú�ȫ��λϵ�y�fͬ��������X�����ڛ]���κ�������ӵIJ����£��ԄӰ�ȫ�ز����C��܇�v��
�����o���{���Ҫԭ������ͨ�^܇�d����ϵ�y��֪��·�h�����Ԅ�Ҏ����܇·��������܇�v���_�A��Ŀ�ˣ�ͬ�rͨ�^܇�d��������֪�܇��h������������֪���@�õĵ�·��܇�vλ�ú��ϵK����Ϣ������܇�v���D����ٶȣ��Ķ�ʹ܇�v�܉�ȫ���ɿ����ڵ�·����
�������������Č������˾ Lexinnova �Ĉ�棬�o���{���܇�lչ����������g��9 헣���܇��܇ͨӍ(V2V Communication)��Ѳ������(Cruise Control)���Ԅӄx܇(Automatic Brakes)��܇���S��(Lane Keeping)�����_(Radar)��ѭ�E������(Traction or Stability Control)��ҕ�l�zӰ�C(Video Camera)��λ�ù�Ӌ��(Position Estimator)��ȫ��λϵ�y(Global Positioning System��GPS)���������Ļ������g�У�ǰ��헼��g�Č�����Ո���������^�࣬������Ҫ�ļ��g��
�o���{���܇�������� 9 ���g

�Y�ρ�Դ��Lexinnova
�����o���{�lչ�A�΄���
�����a�I��Ϣ�W�l���ġ�2015-2020���Ї���܇�{��o��ϵ�y��ADAS���Ј������c�lչǰ���A�y��桷�@ʾ���P�ڟo���{���A�΄��֣�Ŀǰ�I������������������·��ȫ�֣�NHTSA�����Ԅ��{�g�Ĺٷ��綨���֞�o�Ԅӣ�0 ���������e�����Ԅӣ�1 ��������N�����Ԅӣ�2 �����������Ԅ��{3 ��������ȫ�Ԅ��{4 �����傀���e��
������·��ȫ���Ԅ��{�g�ķּ�
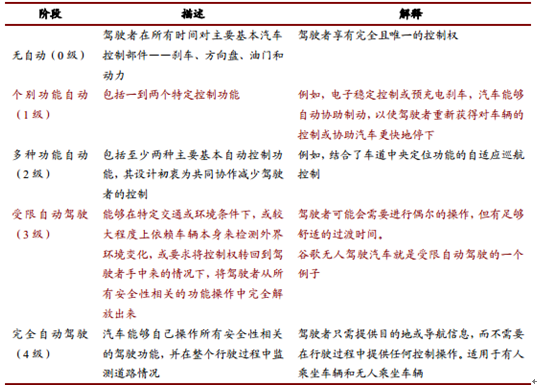
�Y�ρ�Դ��NHTSA
������Ŀǰ�lչ��r�����Ԅ��{�������܇���g�İlչڅ���ѽ��õ��I��V���J�ɣ��Ԅ��{� 1 �������e�����Ԅӣ��ѽ��õ������ռ����������e�lչ��r��һ��
�����Ԅ��{� 2 ������N�����Ԅӣ��ռ��Ȳ�����ߡ��W�� 2012 ��ͳ��_���P��Ҏ��Ҫ�����е��̄�܇�v��Ҫ�� 2013 �� 11 ��֮ǰ���b�þo���Ԅӄx܇ϵ�y AEB(Automatic Braking Assistance)��2014 �������КW���Ј��N�۵���܇��Ҫ��� AEB���]�����ԓϵ�y����܇�����ܫ@�� E-NCAP ���Ǽ��İ�ȫ�J�C��Volvo �ij��а�ȫϵ�y������� CMBS�����Y�� Pre-Safe �������@���ӴΣ�ĿǰӢ����ϵ���܇���܉��Ԅӿ��Ʒ���P��
�����Ԅ��{� 3 ���������Ԅ��{Ŀǰ���γ��r�Ρ���ķ�յı��Y S ϵ�I܇�����ڶ�܇����r���ԄӸ�܇��
�����Ԅ��{� 4 ������ȫ�Ԅ��{Ŀǰ���ú��١��@�����e�Ǹ�������܇�ȸ衢�ٶȵȻ��W��˾�������_���ĽK�OĿ�ˣ��{�����ȫ���زٿ�܇�v��
�����ć���������������o 70 ����_ʼ��������Ӣ�������Ȱl�_���Ҿ��ѽ��_ʼ�M�Пo���{���܇���о����ڿ����Ժ͌��û����涼ȡ����ͻ���Ե��Mչ����Ҫ��־���¼��飺
����1970 ��ǰ��һЩ܇��ʹ�����l�ʹ�ᔵķ�ʽ�팧��܇�v���F�Ԅ��{
����1977��2000 �꣺�ձ����W��������һЩ��У�M����һЩ�����_���Ŀ �� �� Ҫ �� �� �o �� У �� �� �� Ժ �� �M �� �� �_ �� � Ŀ �� �� EUREKA Prometheus��CMU NAVLAB��AHS Demo��
����2004 �� 2006 �꣺�քe�M�� DARPA ��һЩ��ِ���Ą������У�M�����H��܇�v��������c��ِ��
����2007 �꣺DARPA ��������ِ���x���˳��е�·�@��кܸ��y�ȵ��Ŀ������ Carnegie Mellon �� Stanford �@�ɂ�܇꠱�ِ�ɿ��ܽӽ���
����2015 �� 6 �� 26 �գ�Google �o���{�܇��ʽ�_���������ݵĹ�·�M�Мyԇ��
����2016 �� 1 �� 15 �գ�����������������Ӌ����δ�� 10 ��ܿ� 40 �|��Ԫ�����ٟo���{���܇�İlչ��ϣ���p�ٽ�ͨ�¹������ʺͽ�ͨ��� �r��
����2016 �� 1 �� 19 �գ����ձ���ͬ�������χ�Մ�����P��ʿ��ʾ���P��ȫ����܇�S�����M�аl���Ԅ��{�ϵ�y���ƶ���܇���HҎ�t���χ��C�����_ʼ�ƶ���ȫ��Ҏ���AӋ�ձ��͵�������������P�ڸ��ٹ�·����Ҏ���猢�� 2017 �� 3 �«@��ͨ�^���ɆT�������Շ��H��Ҏ���Ƈ��ȷ���
����2016 �� 1 �� 29 �գ�Ӣ����ͨ�����������S�Ԅ��{���܇�ڂ��ؽ��^��·�yԇ���� 2016 �� 7 ����“���������Ԅӻ���ͨ�h���Ŀ”�ĵ�һ�v�Ԅ��{�܇���ڂ��ؖ|�ϲ���̩��ʿ�Ӹ������ΰ�u�ĵ�·��ԇ܇��
����2016 �� 2 �£������O�ܲ��T��֪�ȸ裬����������ɣ��ȸ�o���{���܇���Ա�ҕ��“˾�C”���@�ǟo���{�g�����緶�����~������Ҫһ����
����o���{�lչ�v�̺���

�Y�ρ�Դ�����_�Y������
�����ڇ��⣬Ŀǰ�ȸ�Ȼ��W��˾�������I�o���{�lչ�ij������o���y��܇�lչ���P���g�������^��������˹�����W�ϡ��ծa���֠��֡����Y���S��ȏS�����^�ӿ����аl��������Ŀǰ�lչ��r������܇�S�̻���̎���Ԅ��{� 2 ������N�����Ԅӣ����Ԅ��{� 3 ���������Ԅ��{���^���A�Ρ���������Ŀ��Ҏ�����AӋ 2020 ��ǰ�������Ƴ���һ���������x�ϵ����a�Ԅ��{���܇�aƷ��
������Ҫ��܇��I�o���{�g�lչ�śr
�Y�ρ�Դ�����_�Y������
�������Ȱlչ��r
�����҇��������o 80 ������_ʼ�M�Пo���{���܇�����P�о����Mչ���£�
���������Ƽ���W 1992 ��ɹ����Ƴ��Ї���һ�v�������x�ϵğo���{���܇��
����2005 �꣬���v���Пo���{���܇���Ϻ���ͨ��W���Ƴɹ���
����2011 �� 7 �£���һ�����F�c�����Ƽ���W��ͬ���Ƶļt�� HQ3 �o���{���܇�����286 ����ĸ���ȫ�̟o���{�ԇ�˹����A�ľ��x�Hռ����̵�0.78����
����2012 �꣬܊�½�ͨ�WԺ��“܊���ͪ{��̖”�ԟo���{��B��� 114 �����ߕr�� 105 ���С�r��
����2015 �� 12 �³����ٶȟo���{���܇�ڱ����M��ȫ���Ԅ��{�y�ܣ����F��θ�܇�p�١�׃������܇�������ѵ����{�^�ȏ��s�{������������M����ٵ������ٲ�ͬ��·�������ГQ����ߕr���_100 ���С�r���LJ��ȟo��܇�I�������ֹ�M�е��y�������ӽ��挍·�r���_�ŵ�·�yԇ��
����2015 �� 12 �� 14 �գ��ٶ�������ʽ�����Ԅ��{��I����Ӌ�����ꌍ�F�Ԅ��{���܇�����û������ꌍ�F���a��
������ͬ�ڇ���܇���������аl�������҇���܇�S�̶��ȡ�c���ȿ���Ժ������У�����аl�o���{�g�������ѽ��_ʼ���P�о���������I��һ���������������������L���ȡ����У�2015 �� 7 �£��L����܇�l�����ܻ���܇“654”���ԣ�Ӌ���� 2025 �꽨���� 1500 �˵��аl��飬��ӋͶ�� 130 �|Ԫ�����o���{��������܇���gˮƽ��������ȫ�Ԅ��{�g��
������Ҫ��܇��I�o���{���܇�аl��r

�Y�ρ�Դ�����_�Y������
�����҂��J�飬Ŀǰ�҇��o���{���܇���g�lչ������܇�S�̞����������w��̎���Ԅ��{� 1 �������e�����Ԅӣ����Ԅ��{� 2 ������N�����Ԅӣ����^���A�Σ��lչ���@�����ڇ��⡣��ӿ��������gˮƽ�����Ї����� 2025�����c�I���g·���D�ѽ����o���{���܇������܇�a�Iδ���D����������Ҫ����֮һ��δ�팢����Ӵ�����֧�����ȡ�ͬ�r���S�� 5G ���O�����M��“�f�ﻥ”���ɞ���ܣ��Ķ��������{���܇��Ѹ�ٰlչ�춨�W�j���A�l����
�����o���{���܇���g�lչģʽ��
�������S��
�����S������ 2020 �����Ҍ��F����“��܇���õ�·”��ʹ�õ��Ԅ��{�g���齨���o���{�����ĸ߾��ȵ؈D���S���Ƴ���һ��“�؈D�Ԅ��L��ϵ�y”��ԓϵ�y���Գ�����ô��d�����N܇�ϵĔz���^�� GPS���Ԅ��L��܇�v�Ԅ��{�����횵ĸ߾��ȵ؈D��ԓ헼��g�����錢�����Ԅ��{�܇�v�ṩ���֧�֣�δ��߀�����U�䑪��“һ���·”��“��·�ϵK��”�ȷ���Ĺ��ܡ�
����ԓ헼��g�Ļ���ԭ�������ô��d�˔z���^��܇�v��������^���вɼ�·��D���͵���λ�Ô��������������yһ��������Ϣ�����M�м���̎�����{�����M���Ԅ��L�Ƴ����߾��ȵĵ؈D��
����ԓϵ�y���������S�������о����_�l�Ŀ��g��Ϣ�Ԅ����ɼ��g“COSMIC”���ƿ��g��Ϣ���ɣ���������܇�v�ռ��ĈD���� GPS ��̖�L�Ƹ߾��ȵ؈D��
ԓϵ�yͨ�^���N܇���F�л��A�Oʩ�ռ���Ϣ������ڌ��F��Ϣ���r���µ�ͬ�r��߀����Ч����ϵ�y�ɱ����������֠���
����������܇��ȫ���I���ߣ��֠�������� 2020 ��_������܇�aƷ�������F�ش�����¹ʣ����lչ�Ԅ��{�g�����@һĿ�˵Įa�Ŀǰ���֠��ֵ�܇�v�Ѱ������ԄӾo���x܇�����˺��T܇�߱O�y��܇��ƫ���o�������m��ʽѲ�����Ƶȼ��g��
����Ŀǰ���֠������M��“�߶��Ԅ��{�”�Č��|���Ŀ�yԇ���̘I���A�Σ���ӿ�o���{����P���g�аl���ƏV��2014 ���֠��ְl�����c�����Ŵ���� Sensus ���ܲ���ϵ�y��Sensus ���ܲ���ϵ�y���ڐ����ŵ��ƶ˷��գ��ṩ��������Connect�������գ�Service�����ʘ���Entertain����������Navi�������ƣ�Control���ڃȵ�܇�d�����ܣ��Ԍ��F��ȫ����ݡ����ܡ���Ч��܇���⻥�wּ�ڴ������܇�W�����W�ʹ������ܳ��н�ͨ���Bϵ�y��
����Ŀǰ��Sensus ���ܲ���ϵ�y���Ї��ĺ����������ٶȡ�ͨ���ߵ¡�����ȡ�
����ͬ�r���֠����c�O�� CarPlay �ȸ� Android Auto �����_�ɺ����ˣ�δ���֠���܇����ͨ�^ Sensus �cĿǰ�ɴ�����V���������֙Cƽ�_�M�л���ͨ��
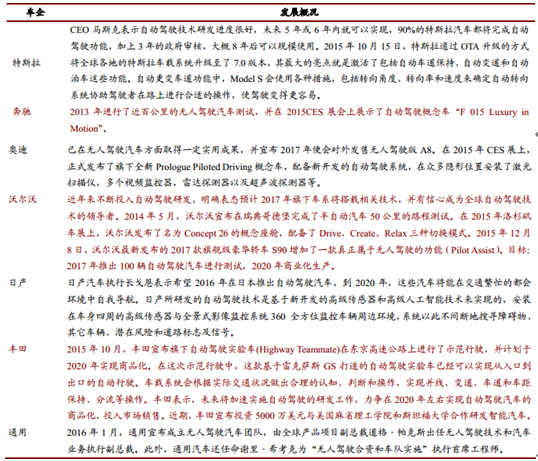
�����ی��R
�������� 2013 �꣬���R���c��܇�㲿�������̴�ꑼ��F�����_�l�o���{���܇����ҪĿ���Ǟ� 2020 ��֮���Ԅ��{�gͶ�둪�����ʂ䡣
����2014 �꣬���Rչʾ�����аl�ğo���{�g��ԓ���g���H���Ԏ���܇���ڽ�ͨ��r���µij����ҵ���ݕ�ͨ�����·����ͬ�r�������Z���{�T����܇���ƿؙࡣ���R����������“UR��BAN research”�����п��g����ԓ���g�����Ñ������ľW�j�������o��ϵ�y�������ڎ����{�T���_·�ϵ����ˣ�ͨ�^�A�y��ͨ��̖����׃����ʽʹ���и���형����Ӹ�Ч��
����“UR��BAN”�Ŀ���аl�������m��2016�꣬�������c��������������аl�ϣ��J֪�o�����W�j����ͨϵ�y����ͨ�е��˞����ء�“�J֪�o��”ϵ�y��Ŀ���ǣ������{�T�r���Pע�������˵Ą���
�������R�O������܇�ϰ��b���“�J֪�o��”ϵ�y���������M���Ԅӷ���������܇�������A������܇�S�r��ȡ�Ԅ��D����Ԅӄx܇�Ĵ�ʩ������ײ�����ˡ�
����Ŀǰ�����R�ь��@һ���g�ڌ��R 5 ϵ���M��ԇԓ���g���R�e�����˵��w�Σ���ͨ�^Ӌ������������˵�λ�ú͌��ߵ�·����
�������R�������M����һ�Ŀ“Urban Roads”�����_�l“�Gɫ�f�{�͜p���o��ϵ�y”��ԓϵ�y��Ӌ����t�G����׃�Q�r�g��������Y�Ϯ�ǰ�Č��r·�r��Ϣ��֮���S�r�{����·�Ͱl�әC�O�ã��Ԍ��F���Ч���{��B��
������ 2015 ��� CES չ�ϣ����R�Ƴ���ȫ�µ��Ԅ��{�g������ 360°�A����ײϵ�y�Ͷ���ͣ܇��ȫ�ԄӲ�܇���g����������ײΣ�U�r��360°�A����ײϵ�y��ͨ�^�����{��߰l�����棬߀��ͨ�^�Ԅ��ƄӸ��A����������ʹ܇�vֹͣ��ͬ�r��ͨ�^��ԇ�܇���ϰ��b�˸߾��ȵ� GPS �Լ���������ꇣ��ڷ������������֮����܇��ᘌ���ǰ·�r�������_�Дࡣ
������Tesla
������˹�� Model S P85D �ڰl���r���S�̾����_��ʾ����и���������Ɍ��F�Ԅ��{�ܡ�ֻ���^�����ڮ��r�ļ��g�l�����ƣ�ܛ������s�]��ȫ���_�����еĂ����ܣ��e���Ԅ��{�ܡ�
����2015 �� 10 �£���˾�l�� 7.0 �汾�̼����̼��д��d������ Autopilot ���Ԅ��{�ܡ��Ñ�ͨ�^�ھ������S�����͵Ĺ̼��ɽ��i�Ԅ��{�ܣ���˹�����Ԅ��{����Ҫ�����Ԅ�܇�����֡��Ԅ�׃�����ԄӲ�܇�ȹ��ܡ�
�����c�ȸ�o���{�����ͬ���ǣ���˹���������������x�ϵğo���{���Ǹ��Ԅ��{���o���{���ȸ�Ľ�Q���������������߾������_���߾��Ȃ������߾��ȵ؈D������˹���ĸ��Ԅ��{�t�������ه�z���^�������C��ҕ�X�M��܇�����֡�׃���ȹ��ܡ�
��������������ԣ�Google�����뻯��ֱ��ָ��K�O��Q��������Tesla���Ռ�Щ���F�A�εĿ����Ը��ߡ����ڣ���˾�l�������µ� 7.1 �汾�̼���7.1 ϵ�y���������o���D��İ�ȫ���ƣ���܇���_����˹�� Model S �M��סլ�^���r��܇�v����ͨ�^�؈D�Ԅ��R�e��·�h������܇�v������һ���ٶȃ���
�������⣬7.1 ϵ�y߀�������֙C�ن����ܡ������ن����ܣ���ʹ�{�T��܇�⣬Model S �� Model X Ҳ����ɲ�܇����x܇λ�IJ���������߀�ܸ�����Ҫ�_�����P�]�A����܇���T���ن������ǹ�˾�~��ȫ�Ԅ��{����Ҫһ����չ�F����˹�����Ԅ��{��I����I�ȵ�λ��Ŀǰ����˹�����J����ȫ�������a܇�����Ӱ�ȫ�͜��Ԅ��{����������M����܇��
����ֵ��ע����ǣ���˹�����Ԅ��{��Ҳ��ͨ�^“�����W��”�M�в������ƺ̓�����Ŀǰ���鲼 42 �����ҵĿ͑����{� 107000 ���v��˹����܇��Ӌ����˽�20 �|Ӣ���˹���Ԅ��{��������ÿ�� 100 ���fӢ����ٶ��M�ЌW������˹����ͨ�^��܇�c���딵����ğo���B�Ӂ��ռ�����܇�v�g����Ԕ���������@�����ڴ���ɿ��w��߂���һ�������ݡ�
�����C�Ϸ������҂��J�飬��Ŀǰ�lչ��r�����S��֠��֡����R��tesla ���������܇��o���{�g��Ҫ���Ԅ��{� 1 �������e�����Ԅӣ����Ԅ��{� 4 ������ȫ�Ԅ��{�M��lչ����ѭ�����y���ɺ��ε����s�İlչ·����ͨ�^܇�W�� ADAS ���֣��Խ����߾��ȵ؈Dϵ�y�������S���Ԅ��{�ܼ��Ⱥ���ѭ��u�M����K���F�������x�ϵğo���{
�������W�S��ֱ��������e�o���{��I��
�����c��܇�S�̲�ͬ���ǣ����W�S��ʼ�K���ʽ���ˑB�M�롣��܇�S�̴�����o���{����ģ���ԇ�b����o���{�ϵ�y���M�����o���{��^�ɵ��Ԅ��{�����W�S�̄tֱ�ӏğo���{����룬���˹����ܡ��߾��ȵ؈D�ͼ������_�ȼ��g�C�ό��F����e�o���{�κΕr�g���κ�·�r�Ԅ��{��
�Ԅ��{��c�o���{�IJ
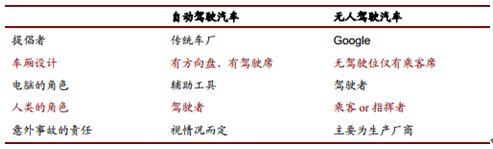
�Y�ρ�Դ��܇�ƾW �����Cȯ
�����c��܇�S�̡��㲿���S�̲�ͬ���ǣ����W�S������܇���졢�㲿��������I����М\��������Ӌ�㡢��̎�����˹����ܡ��߾��ȵ؈D���I�����^�����@�ă��ݣ����˹����ܺ߾��ȵ؈D��“ܛ����”������Ƴ��o���{��Q����������“ܛ”��“܇”���F“�”��
������Ҫģʽ
�����ٹȸ�
�����ȸ��ǻ��W��I�_�l�o���{�g�����ȸ�Ŀǰ�ğo���{�g�� level4���e����ȫ�����ˮ�ʡ�Google Driverless Car �ǹȸ蹫˾�� Google X ������аl�е�ȫ�Ԅ��{���܇������Ҫ�{��߾��܆��ӡ�����Լ�ֹͣ���� 2009 ���һ���Ƴ��o���{���܇Ӌ���ԁ����ȸ�ğo���{���܇�ѽ��lչ���˵�������ǰ�ɴ������ڬF��܇�����M�и��쌍�F�ģ���һ�������S�����J˹�Ļ��A���M�и��b�ģ��ڶ����ǻ������_˹ SUV ���b�ġ�
�����������ǹȸ���^�_ʼ�OӋ���a�ğo���{���܇��ԓ܇�� 2015 �� 6 �µ��Ƴ�����������ԭ��܇������������P�����T̤�塢��ҕ�R�������������ɴ˿��Կ����ȸ茦�Լҵğo���{���܇�dz������š�
����2009 �����ȸ�o��܇���Ԅ��{�ģʽ���ѽ��۷e����_ 228.5 �f�����ͨ�^�ք��ܿ��{��ѽ���Ӌ��� 159.2 �f���Ŀǰ���@������߀����ÿ�� 1.6~2.1�f������ٶ������L���Ԅ��{���̵��۷e������Ӗ���ȸ�o���{����ϵ�y��ʹ���˹����̶ܳȸ��ߣ��M���܉F“�κΕr�g���κ�·��”�ğo���{
�����ڰٶ�
����2015 �� 12 �£��ٶȹ�˾�������ٶȟo���{�܇�����״Ό��F���С��h·�����ٵ�·���·�r�µ�ȫ�Ԅ��{�ٶȹ�����·�y·���@ʾ���ٶȟo���{�܇��λ�ڱ������P��ܛ���@�İٶȴ�B�������l����� G7 ���¸��ٹ�·������h·�����_�W��ƥ��ɭ�ֹ��@�����S��ԭ·�����ء��ٶȟo���{�܇����ȫ�̾����F�Ԅ��{�����F�˶�θ�܇�p�١�׃������܇�������ѵ����{�^�ȏ��s�{������������M����٣��R��܇�����������٣��x�_܇�����IJ�ͬ��·�������ГQ���yԇ�r����ٶ��_�� 100 ����/С�r��
�����ٶȟo���{�܇�Ŀ�� 2013 �����ɰٶ��о�Ժ�����аl���似�g������“�ٶ���܇���X”�������߾��ȵ؈D����λ����֪�����ܛQ���c�����Ĵ�ģ�K��
�������У��ٶ������ɼ��������ĸ߾��ȵ؈Dӛ����������S��·��Ϣ�������������Ȍ��F܇�v��λ��ͬ�r���ٶȟo���{�܇���Ї��H�I�ȵĽ�ͨ�������w�R�e���g�ͭh����֪���g�����F�߾���܇�v̽�y�R�e����ۙ�����x���ٶȹ�Ӌ��·��ָ܇�����z�y�����Ԅ��{�����ܛQ���ṩ������
�����ٶȵğo���{��Q�����c�ȸ���ƣ����������˹����ܡ��߾��ȵ؈D����ģ����Ђ��������������_��Ӳ���O�䘋��������e�o���{�ϵ�y���ٶȴ��X�����c���y܇�S��ȵĺ��ĸ���������Ϥ���ٶȴ��X����Ӌ��C���˹����ܣ�ģ�M���X˼�S��ģʽ������ 200 �|��������ͨ�^ģ�M���X�ğo����Ԫ�Ĺ���ԭ���M�����죺�惦��“˼��”��
������Mobileye
����Mobileye �LJ��H ADAS �I����I���S�̣�ʼ���� 1999 �꣬����λ����ɫ��,���������������ձ���������Ҳ�зֲ������о����T����Ҫ��������܇���I��Ӌ��Cҕ�X�㷨���{��o��ϵ�y��оƬ���g���о������о��ɹ��ͮaƷ����ҕ��Ŀǰ��������피���“�����{��o��ϵ�y”,�Ѽ������֠��֡�ͨ�á����R���F�����֠��ֿ�܇�����Z��܇��������܇���������a��܇�v�С�
����Mobileye ��ҕ�X����������ͨ�^�����оƬ EyeQ2 ҕ�X̎�����ʹ����һ���㷨�팍�F��Mobileye ���P�I���gͻ�����������Б���ֻʹ��һ���z��C�Ҍ���������������������һ������ EyeQ2 ̎�����Ĕz��C��ͬ�r�\�С���ˣ�Mobileye��ͨ�^��һӲ��ƽ�_�ṩ���ϵ�y�Լ�����֮ǰֻ���ɲ�ͬ�����������ɵ��΄շ���������@�ă��ݡ�
����ͨ�^һ�������жȵĔz���^���x��܇�v�^��ǰ��/�܇�����������ͨ�^܇�v�W��ͨ�^�P�I������݆������e�܇��ĭh�������R�e���ˡ�����܇��Ħ��܇����܇�����ٶȘ��R��������ͨ���ߵȣ�ͨ�^Ӌ���ٶȡ��Ƕȵ��P�I�����M����ǰ�A�У���ͨ�^�D�����������{�T��߾��衣
�����҇��������Ј������^�����L���a���ϣ�2014 ��܇�d�������_�� 9515 �fֻ��2010-14 �����ͺ������_�� 22.29%���Ј�Ҏģ�ϣ������yӋ�֔����@ʾ��2014���҇�܇�d�������Ј��_�� 128.3 �|Ԫ��2011-14 ��ͺ����� 6.81%��
2009-2014���҇�܇�Â������a������λ���fֻ��
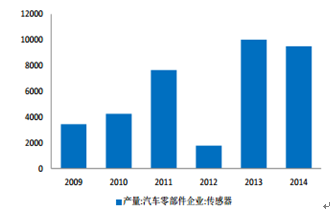
�Y�ρ�Դ�����_�Y������
2011-2014���҇�܇�d�������Ј�Ҏģ
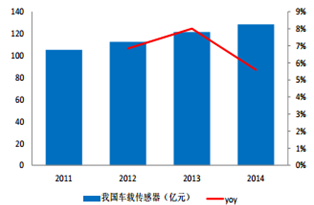
�Y�ρ�Դ�����_�Y������
�����S��������܇���o���{���ռ���܇�d������������������������λ��܇���������������m����������߉�҂��y�㣬2020 ���҇�܇�d�������Ј����_��243.19 �|Ԫ����ͺ����� 11.25%�������^�����L��
2014-2020���҇�܇�d�������Ј��A�y
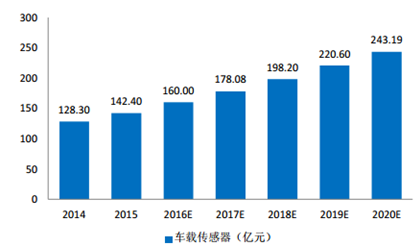
�Y�ρ�Դ�����_�Y������
�����C�Ϸ��������]�����N�������ijɱ��������c���g�lչǰ���� �҂��AӋ���������_�����ײ����_�Լ����wҕ�X�z���^�������������δ�����g�lչǰ�������ڟo���{��̘I�������п�������Ă�������ͣ�Ŀǰ������“���ײ����_+���wҕ�X�z���^”�ķ����ԃr���������ߣ����������ȿ����ƏV��
�����������İ���wԭ�������У��D�d���H�����������Ϣ֮Ŀ�ģ������֙��О飬Ո��һ�r�gϵ�҂��Ļ�h�����]�䣺cidr@chinaidr.com�� -
- ���c�YӍ
- 24С�r
- ������
- ������
- ¶�I����ѩ�����˄��f�|���Ј������c�_���� �b����I현ݰl����S�U��
- ����·�A���ˣ��۬����y��ϵ�u�Rָ�ϡ���һ���ƻ�ϲ�������ƴ����I�N�T��
- �����Οᡱ��ʎ�Ї�
- ���̽��������a�I����
- ���Ӱ���𬔴�����۬��R��CNY�I�N��������݆܇�ИI�I�N���]�h
- ѩӳ�|�����y�c�hâ��ë��ƽƷ�������Ї�������ҫ���m��
- ��ء��й�+�ЌW��ģʽ �c�������_������
- 2022���ϰ�����ɫ�����ИI�\����r
- ���������U��؛�ϼsҎ�t��ӆ�����Ј���Ҋ
- �S�𡢰��y�r�� �Ϻ��S�������l������֪ͨ


��� | �Wվ��B | �P���҂� | �aƷ�c���� | �̘I���� | ����� | �������� | �̘I�YӍ | ϵ�҂� | ����朽� | �Wվ�؈D
���������������б����д��·ʮһ̖11̖�̄�4�ӡ��]����100141
�����\�I���ģ������н������g�_�l�^�P�Ƕ�·10̖��ؕr���V��C��12��
ȫ�����M��ԃ�ᾀ��400-680-5790 (7*24С�r�������ԃ�Ԓ��18411010258 ���棺010-58850975
�I����ԃ������17810330644�������� ����]����cidr#chinaidr.com(��#�Q��@) ����QQ��330291710
Copyright © 2009-2025 chinaidr.com, All Rights Reserved���a�I�lչ�о��W ������� �Wվ�䰸����ICP��11011445̖-2
���������������б����д��·ʮһ̖11̖�̄�4�ӡ��]����100141
�����\�I���ģ������н������g�_�l�^�P�Ƕ�·10̖��ؕr���V��C��12��
ȫ�����M��ԃ�ᾀ��400-680-5790 (7*24С�r�������ԃ�Ԓ��18411010258 ���棺010-58850975
�I����ԃ������17810330644�������� ����]����cidr#chinaidr.com(��#�Q��@) ����QQ��330291710
Copyright © 2009-2025 chinaidr.com, All Rights Reserved���a�I�lչ�о��W ������� �Wվ�䰸����ICP��11011445̖-2